Теоретические основы и новые технические решения бесшовного управления группой БПЛА в недетерминированных средах при выполнении сельскохозяйственных задач
Объектом исследования являются средства управления группой беспилотных летательных аппаратов (БпЛА), обеспечивающие бесшовное взаимодействие между аппаратами, а также их адаптивное функционирование в недетерминированной среде на сельскохозяйственных угодиях.
Цель работы – повышение степени автономности и безотказности функционирования групп сельскохозяйственных БпЛА.
Методы исследования – теория многоагентных и самоорганизующихся систем, технологии искусственного интеллекта, технического зрения и другие.
Полученные результаты. В 2025 году разработаны концептуальные и структурно-функциональные модели, описывающие функционирование группы сельскохозяйственных БпЛА и оператора на открытых пространствах сельскохозяйственных угодий. Создано описание сценариев выполнения целевых сельскохозяйственных задач оператором с применением группы БпЛА. Выполнено проектирование и создание опытных образцов четырех прототипов сельскохозяйственных БпЛА со специализированным навесным оборудованием для внесения жидких веществ, аэромониторинга и реализации интуитивного человеко-машинного интерфейса между оператором и группой БпЛА.
Планируемые количественные показатели объема содержания работы выполнены, в том числе опубликовано более 12 статей в российских и международных журналах, индексируемых Web of Science, Scopus, RSCI, РИНЦ.
Область применения. БпЛА в области сельского хозяйства, экологии, логистики.
Значимость работы. Повышение точности, производительности и экологической безопасности сельскохозяйственных работ, а также снижение когнитивной нагрузки на оператора и ускорение внедрения роевых робототехнических решений в сельскохозяйственный сектор.
Дальнейшие научные исследования по теме будут продолжены в рамках Программы фундаментальных научных исследований в Российской Федерации на долгосрочный период (2021–2030 годы).
Научным коллективом создан набор требований к БпЛА в составе группы, навесному оборудованию, сенсорной системе и особенностям человеко-машинных интерфейсов для реализации целевых задач, а также предложено описание сценариев выполнения целевых сельскохозяйственных задач оператором с применением группы БпЛА.
В ходе выполнения задач исследования разработаны концептуальные и структурно-функциональные модели интуитивных человеко-машинных интерфейсов и управления бесшовным функционированием группы сельскохозяйственных БпЛА на открытых пространствах, учитывающие специфику целевых задач внесения жидких веществ и сбора данных о растениях в ходе аэромониторинга.
Одним из ключевых барьеров широкого внедрения групп БпЛА в сельском хозяйстве является отсутствие специализированной наземной инфраструктуры, обеспечивающей их автономное обслуживание, что значительно может повысить эффективность работы одного оператора. Проведена декомпозиция задачи сервисного обслуживания беспилотных летательных аппаратов на роботизированной наземной платформе, отличающаяся учетом вопросов безопасности посадки БпЛА и его перемещения внутри платформы на конвейере, применением нескольких видов автономного позиционирования, обеспечивающих надежную навигацию в условиях отсутствия средств ГНС. Предложена компоновка наземной автоматизированной платформы сервисного обслуживания, отличающаяся наличием четырехсекционной конвейерной линии, компактно складывающейся в транспортном состоянии, обеспечивающей вынос посадочного места на безопасное расстояние и одновременное обслуживание до трех БпЛА, включая замену аккумулятора, заправку рабочей жидкости и транспортировку на стартовую площадку. Оригинальность предложенной модели автономной платформы роботизированного обслуживания БпЛА конвейерного типа заключается в комплексе средств, обеспечивающих площадку для автономной посадки, роботизированное устройство для замены АКБ и заливки жидкости в бак. Эти качества делают предложенную платформу перспективной основой для создания полностью автономного цикла функционирования группы БпЛА для сельскохозяйственных нужд.
Отдельное внимание в работе уделено задаче технического осмотра: разработан метод определения угла наклона опор на основе изображений с БпЛА, сочетающий параметры камеры, GNSS-данные и алгоритмы машинного обучения. Достигнута высокая точность детекции (mAP50 = 0,71, F1-score = 0,88), а расчётные углы наклона (от 0,6° до 24,5°) позволяют объективно оценивать состояние инфраструктуры, снижая зависимость от человеческого фактора на разметку препятствий на местности и сокращая временные затраты на подготовку полетных миссий для внесения веществ.
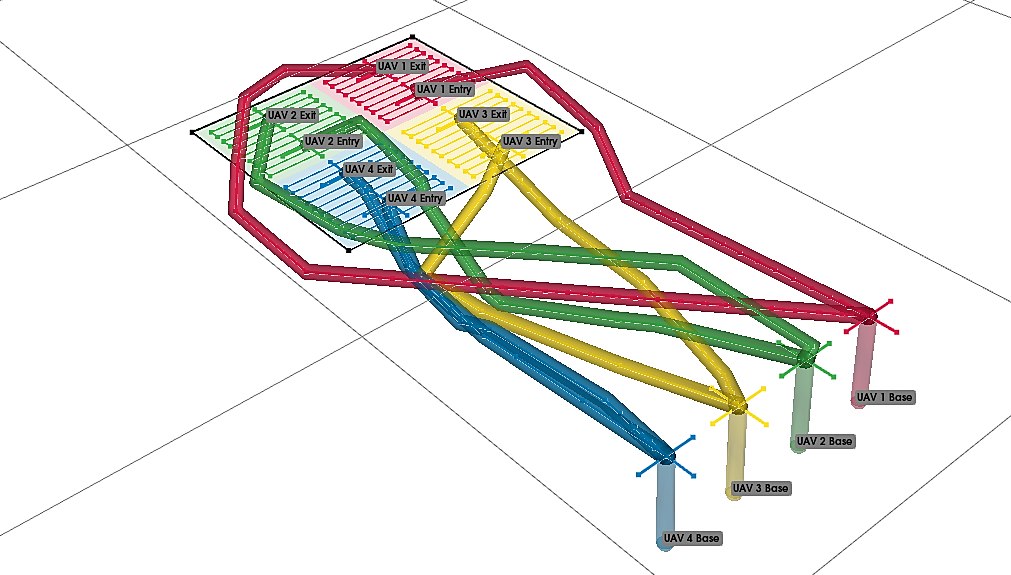
Для обеспечения безопасности полётов группы БпЛА над сельскохозяйственными участками предложен метод планирования капсулообразных воздушных коридоров. Каждая траектория представляется как трёхмерный объём фиксированного радиуса, охватывающий возможные отклонения аппарата вследствие навигационных погрешностей или ветровых возмущений. Планирование маршрутов осуществляется последовательно с учётом уже зарезервированных коридоров, а проверка на коллизии реализована через аналитический расчёт пересечений между капсулами и зонами обработки, дополненный иерархической фильтрацией для повышения вычислительной эффективности. Численные эксперименты на площадке 1 км² для групп до 32 аппаратов подтвердили работоспособность метода, хотя и выявили нелинейный рост вычислительной сложности с увеличением числа агентов, что обусловлено возрастающей плотностью воздушного пространства. Несмотря на недостатки метода они не снижают его практической ценности, т.к. все траектории планируются до вылета БпЛА и в ходе движения БпЛА не требуется выполнять их перепланирование для безопасного полета.
В области человеко-машинного взаимодействия создан эргономичный одноручный ПДУ, отвечающий требованиям интуитивности и мобильности. Новизна решения заключается в отказе от традиционных стиков в пользу гибридного интерфейса на базе IMU-датчика, бесконтактного датчика Холла и потенциометра, что снижает когнитивную и физическую нагрузку на оператора. Прототип массой 210 г обеспечивает до 1,5 ч автономной работы, дальность связи до 10 км посредством протокола ExpressLRS и точное управление за счёт антропометрически обоснованной формы. Дополнительно разработан контроллер режимов полёта для FPV-БпЛА, интегрирующий визуальную навигацию в систему управления с минимальной задержкой (0,42 мс), что позволяет реализовать частичную автоматизацию полёта без ущерба для реактивности.
Кроме того, реализовано проектирование и создание опытных образцов четырех прототипов сельскохозяйственных БпЛА со специализированным навесным оборудованием и опытного образца прототипа оборудования для реализации интуитивного человеко-машинного интерфейса.
Полевые испытания 2025 года, проведённые на Новгородском опытном поле СПб ФИЦ РАН в условиях экстремального переувлажнения (269 мм осадков в июне–июле), подтвердили высокую эффективность применения беспилотных летательных аппаратов (БпЛА) на ключевых этапах выращивания картофеля: мониторинге состояния посевов, формировании ортофотопланов и проведении точечных пестицидных обработок. Использование БпЛА моделей QX22S4 и GD-4 позволило обеспечить оперативный и высокодетализированный аэромониторинг при наземном разрешении до 0,1 см/пиксель, а также выполнить равномерное внесение средств защиты растений с нормой расхода всего 50 л/га против 300 л/га при наземной обработке.
В условиях, когда применение наземной техники было затруднено или невозможно, БпЛА обеспечили своевременное выполнение всех фитосанитарных мероприятий, предотвратив уплотнение почвы и механическое повреждение ботвы. Визуальная и количественная оценка показала превосходство опытного варианта: сохранение зелёной массы до конца вегетации, локализованный характер поражения фитофторозом и альтернариозом, а также увеличение урожайности на 14% (39,06 т/га против 33,91 т/га на контроле) при росте выхода товарных клубней до 94,5%.
Квалифицированным заказчиком исследования, принимающим участие в формировании научно-технического задания, выступил ряд компаний сельскохозяйственной отрасли: КФХ Степанов А.Н., Сельскохозяйственный сбытово-снабженческий потребительский кооператив «ОРАТАЙ» и др.
Эксперимент подтвердил, что эффективность обработки БпЛА напрямую зависит от согласования технических параметров с агробиологическими особенностями культуры и погодными условиями региона. Полученные результаты согласуются с международными исследованиями и демонстрируют, что БпЛА являются не только инструментом точного внесения СЗР, но и ключевым элементом цифровой агроэкосистемы, обеспечивающим интеграцию данных дистанционного зондирования, анализа вегетационных индексов и адаптивного управления агротехнологическими процессами.
Несмотря на отсутствие в Российской Федерации правового регулирования пестицидных обработок с БпЛА, полученные данные подтверждают экономическую и агрономическую целесообразность их применения, особенно в условиях изменения климата и роста экстремальных погодных явлений. Результаты исследований заложили основу для дальнейшего масштабирования технологии и разработки адаптивных систем с переменной нормой внесения, интегрированных с платформами анализа больших данных и машинного обучения.
Полученные результаты: концептуальные модели, алгоритмы, аппаратные прототипы и экспериментальные данные, формируют надежную основу для дальнейшего развития адаптивных, когнитивных и самоорганизующихся систем управления группами БпЛА, способных функционировать в реальных условиях сельскохозяйственного производства.
Дальнейшие исследования по данной теме будут направлены на разработку алгоритмов и программных средств бесшовного взаимодействия внутри группы БпЛА при коммуникации, перемещении и выполнении целевых задач (внесение жидких веществ и сбора данных о растениях), создание прототипов интуитивных человеко-машинных интерфейсов на основе сценариев выполнения сельскохозяйственных задач и рассчитываемых параметров по внесению веществ, а также на разработку прототипа и тестирование группы сельскохозяйственных БпЛА со специализированным наземным оборудованием для автономного решения сельскохозяйственных задач.
Демонстрация результатов исследований