Модульная автономная реконфигурируемая система
Модульное робототехническое устройство (МРУ) для построения сложных многозвенных структур МАРС состоит из трех типов блоков:
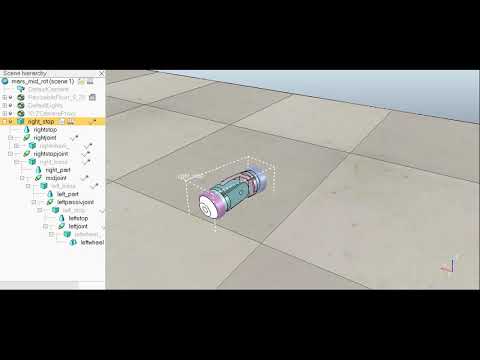
1. Двухосевого актуатора, осуществляющего вращение и сгибание устройства относительно геометрического центра МРУ и двух пассивных соединительных портов;
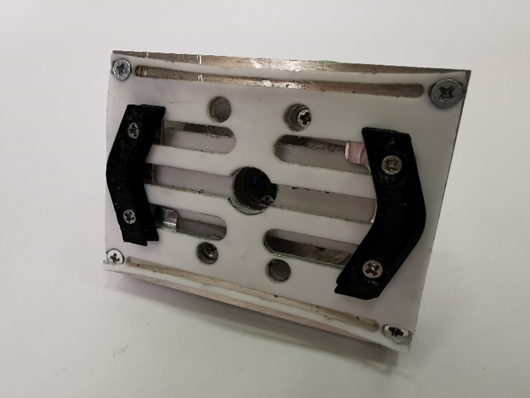
2. Боковых элементов – активного соединительного механизма, реализованного в виде трехпозиционного раздвижного захвата;
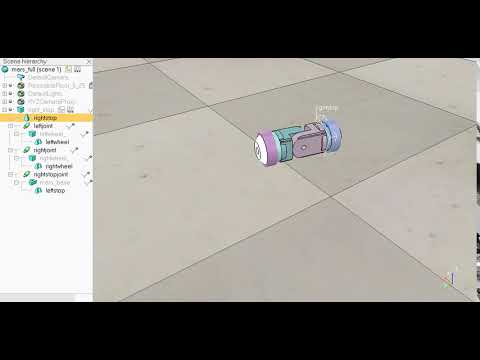
3. Колесной базы – двух пар всенаправленных колес.
Механическое соединительное устройство реализовано в виде раздвижного захвата. МСУ имеет два режима работы: захват; соединительный порт. Пассивный соединительный порт геометрически повторяет захват в закрытом положении.
Технические особенности:
• Инфракрасный сенсор для проверки соосности устройств;
• Самоцентрирующиеся «пальцы» захвата;
• Возможность смены «пальцев».
Двухосевой актуатор обеспечивает подвижность модулей в составе формации. Рабочий угол сгибательного и осевого механизма – 180 градусов.
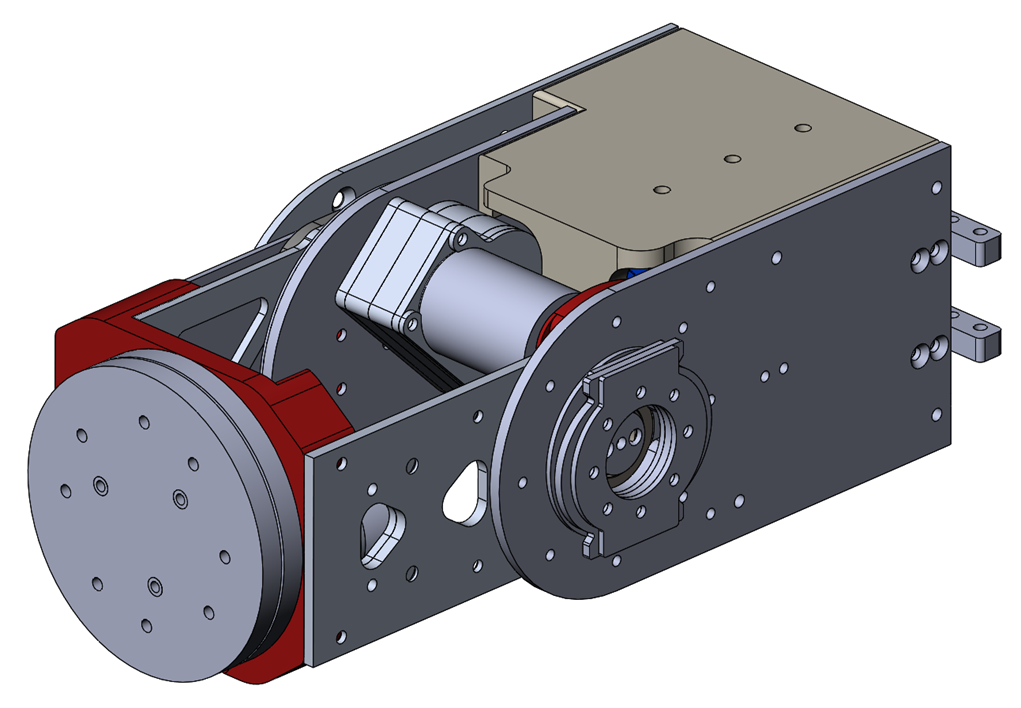
Главная управляющая плата разработана на базе микроконтроллера ESP32-WROOM. Вспомогательные платы управляют двигателями колес и захватного механизма, управляющим узлом служит микропроцессор STM32F030F4B6.
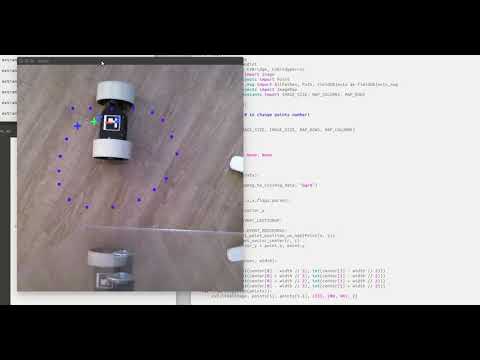
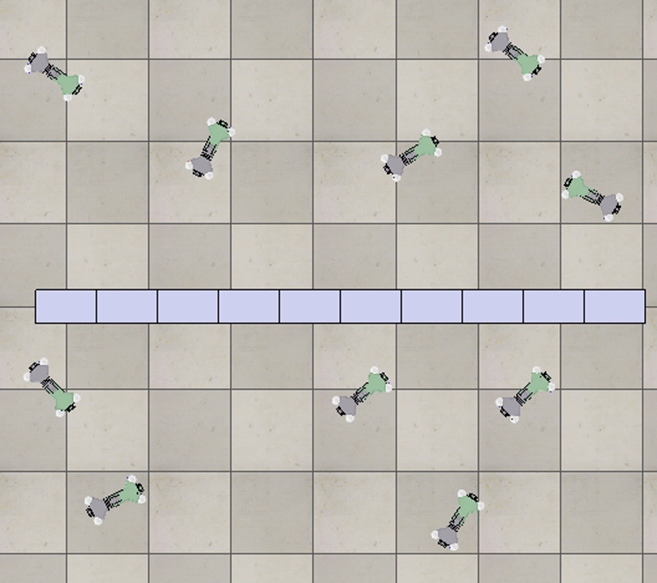
Алгоритм управления МАРС следующий:
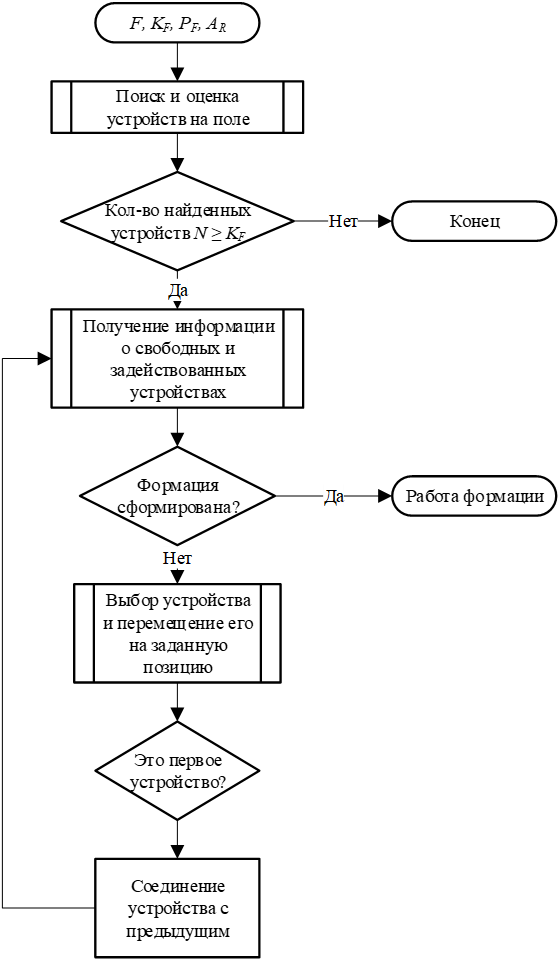
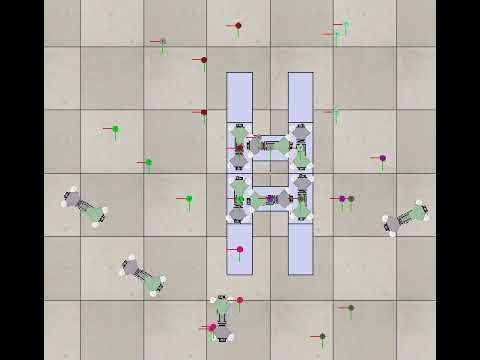
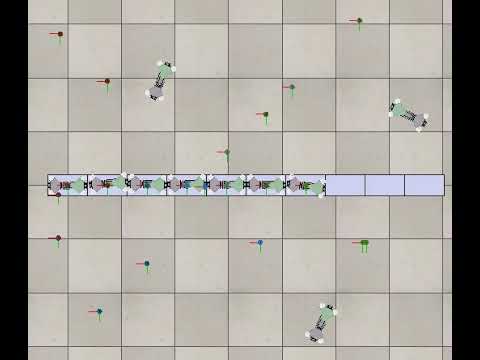
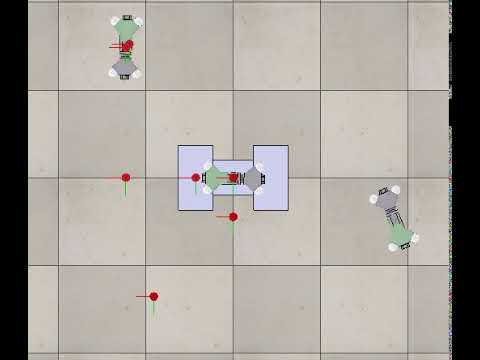
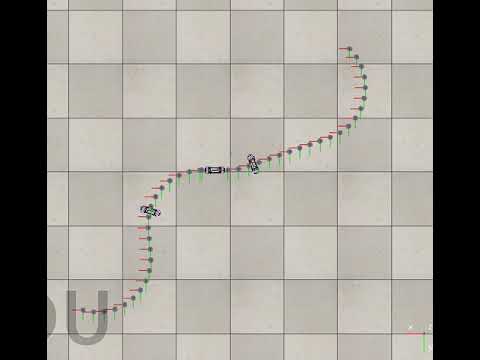
При инициализации работы алгоритма задаются параметры формации: количество устройств, позицию первого устройства на поле, а также ориентацию остальных МРУ относительно него. Осуществляется поиск и оценивание устройств на поле. Устройства последовательно перемещаются на заданные позиции и соединяются друг с другом. Начинается работа формации.
Изображения


















Видеозаписи