ЛАРС

Образовательная наземная робототехническая платформа
В настоящее время практико-ориентированная подготовка обучающихся в рамках освоения программ высшего профессионального образования является приоритетным направлением во всех областях знаний. Применение теоретических знаний в практической деятельности, а также приобретение и закрепление ключевых навыков способствуют повышению качества образования.
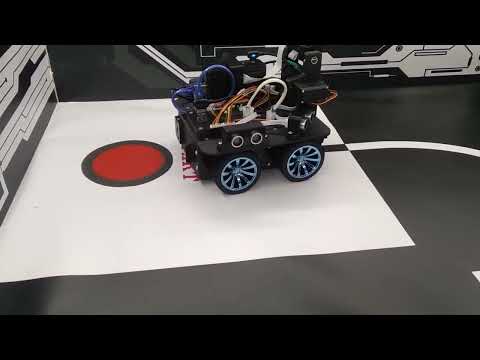
Образовательная наземная робототехническая платформа представляет собой шасси с четырехколесной кинематикой дифференциального типа и распределенной трехуровневой архитектурой системы управления ее электротехническим оснащением. Помимо самой наземной робототехнической платформы состав материально-технического обеспечения образовательного курса включает в себя набор трасс с испытаниями и квестами. По предложенным трассам обучающиеся под руководством преподавателя движутся параллельно, используя программный код и следя за результатом через видеопотоки с камер, расположенных на корпусах роботов. Целью предлагаемого образовательного курса является знакомство с разработанным на базе СПб ФИЦ РАН онлайн-курсом, а именно – освоение обучающимися базовых компетенций в части наземной робототехники, высокоуровневого программирования, технического зрения и социокиберфизических систем, а также микропроцессорной техники в процессе онлайн-обучения программированию многофункциональных роботов с распределенной сенсорной системой на языке Python.
Кроме того, использование представленного в курсе материально-технического обеспечения позволяет изучить все аспекты управления роботами такого типа, а также дает возможность их эксплуатации в учебных и исследовательских целях при реализации практико-ориентированных проектов. В ходе курса участники приобретают знания в следующих темах:
• Управление двумя колесными электроприводами НРП;
• Управления светодиодами видимого и ультрафиолетового спектров;
• Чтение данных с инфракрасных (ИК-) датчиков для движения по линии;
• Чтение данных с RFID-приемника для позиционирования и навигации;
• Чтение данных с ультразвуковых (УЗ-) датчиков для определения расстояния до препятствий и осуществления навигации;
• Управление сервоприводом камеры технического зрения;
• Решение задач технического зрения (распознавание линии, объектов и т.д.).
В результате прохождения курса участники получают базовые навыки работы с наземной робототехнической платформой и ее сенсорными устройствами, изучат основы программирования роботов представленного типа на языке Python, смогут оценить свои силы в решении квестов курса.
Технические характеристики базовой комплектации:
• Размеры основного корпуса, рамы – 60х60х32 см;
• Грузоподъемность платформы в стандартной комплектации – 20 кг;
• Аккумуляторный блок – LiPo 44000 мАч 14,8V;
• Время автономной работы – до 8 часов;
• Всенаправленные колеса;
• Два лидара с углом обзора 360О;
• Шестнадцать лазерных дальномеров с дальностью обнаружения препятствий до 0,5 м;
• Вычислительный модуль Nvidia Jetson TX2;
• Программное обеспечение на базе ROS.
Изображения